[VIP第1年] 指数:3
[VIP第1年] 指数:3
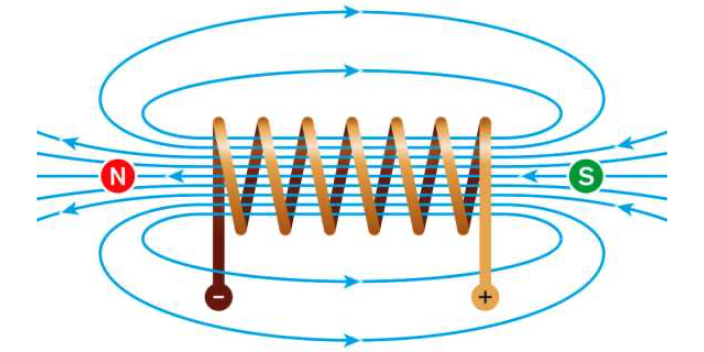
图3-3所示一次为开关管1(**超前桥臂)的驱动波形和电压波形,图中横纵坐标分别为时间和电压值。开通过程:由图可见当开关驱动波形由低电平变为高低前,开关管两端的电压已经为0,故而开关管的开通是零电压开通。关断过程:由于开关并联有谐振电容,在关断开关管时,开关管端电压不会突变,而是随着谐振电容缓慢上升,故而开关管的关断是软关断。图3-4所示为开关管4(**滞后桥臂)的驱动波形和电压波形,图中横纵坐标分别为时间和电压值。同超前桥臂上开关管一样,滞后桥臂上开关管实现了零开通和软关断。在参数调试过程中,滞后桥臂的软开关对参数更加敏感。谐振电容值过大或者谐振电感值过小可能就无法满足滞后桥臂上开关管的零开通。放大器目前将放大整个电压开发的传感器。苏州大量程电压传感器厂家直销

储能电容的计算:1)根据工程经验估算:根据工程实践经验,装置的功率与前端储能电容有对应的关系。整个装置的功率P=UI=2060=1.2Kw,每瓦对应储能电容容量1μF,则可选用电容至少1200μF。2)根据能量关系式计算:储能电容为后续的DC/DC变换提供直流电压,其本身的电压波动反应在电容上可以认为是电容器电能的补充和释放过程。要保持电容器端电压不变,每个周期中储能电容器对电路提供的能量和其本身充电所得的能量相等。储能电容在整流桥输出端,同时也须承担滤波的任务。为了保证对整个装置提供足够的能量,我们所选用的储能电容最小值为1200UF。苏州高精度电压传感器设计标准分为电阻分压式和电容分压式,将初级电压直接转化为测量仪表可用的低压信号。
PID调节器是人们在工程实践中摸索出来的一种实用性强并且控制原理简单的校正装置。1)比例项P**当前信息,调节后的输出与输入信号呈比例关系,偏差一旦产生,控制器立即作用减少偏差。比例系数增大系统灵敏度增加,系统振荡增强,大于某限定值时系统会变的不稳定。当*有比例控制时系统存在稳态误差;2)积分I控制输出与输入信号的累计误差呈正比,积分项可以消除稳态误差,提高系统的无差度,改善系统的静态性能。积分作用的强弱取决于积分时间常数TI,其值越大积分作用越弱。积分作用太强也会导致系统不稳定。3)微分D控制中,控制器的输出与输入信号的微分呈正比,反应信号的变化趋势。并能再偏差信号变得太大之前,在系统中引入一个早期的修正信号,从而加快系统的动作速度,减少调节时间。微分项可以使系统超调量减少,响应时间变快。
程序首先对系统初始化,内部定时器开始计数,计数到产生定时器中断,主程序进入AD中断子程序。AD片选信号置低,子程序实现对AD的初始化,初始化的主要任务是控制AD的输入通道。AD的转换开始信号由DSP的计时器控制,DSP循环计数,当计数器计数到设定值则进入计时中断,中断子程序中给AD一个低电平脉冲信号,AD开始转换,转换完成后AD本身产生一个低电平信号告知DSP转换完成,DSP接收到低电平信号开始读取数据,读取完设定的采样个数后打开DSP总中断发送数据至内部处理器计算处理。如此循环往复,实现了对输入电压电流信号的实时采集。电压传感器的输入是电压本身,输出可以是模拟电压信号、开关、可听信号、模拟电流电平。

在本设计中为防止单臂直通设置了两路保护:1)在超前桥臂和滞后桥臂上分别放置电流霍尔分辨监测两桥臂上的电流值,电流霍尔的输出端连接至保护电路。如果出现过电流则保护电路**终动作于PWM波输出模块,将4路输出PWM波的比较器锁死,使得输出为低电平,进而关断桥臂上4个开关管。2)驱动电路模块内部有过流监测。在所设计的驱动电路中,主驱动芯片M57962内部有保护电路监测IGBT的饱和压降从而判断是否过流。当出现过流时M57962将***驱动信号实现对IGBT的关断。目前,传感器的前列是耦合到带电电压的**小电容器。苏州大量程电压传感器厂家直销
在电压传感器中,测量是基于分压器的。苏州大量程电压传感器厂家直销
随着现代实验研究不断的深入和科学的不断发展,科学家对强磁场环境的要求也越来越高,从而对脉冲强磁场的建设也提出了更高的要求。在欧美以及日本等发达国家已经较早建立了强磁场实验室,主要有美国国家强磁场国家实验室、法国国家强磁场实验室、德国德累斯顿强磁场实验室、荷兰莱米根强磁场实验室以及日本东京大学强磁场实验室。我国强磁场领域起步较晚,近年来,华中科技大学脉冲强磁场中心开展了大量 关于脉冲强磁场的研究工作。苏州大量程电压传感器厂家直销
文章来源地址: http://dzyqj.m.chanpin818.com/chuanganqisr/hecgq/deta_27511601.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。