[VIP第1年] 指数:3
[VIP第1年] 指数:3
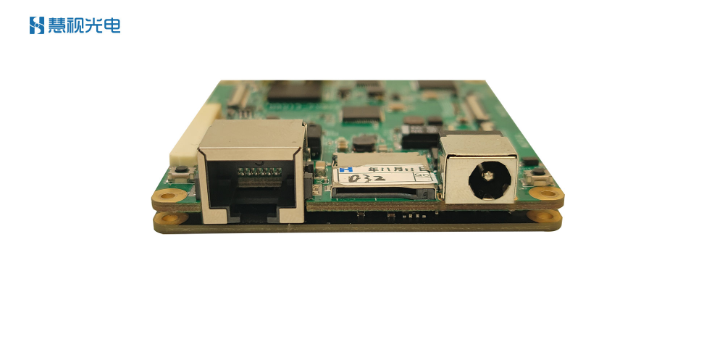
慧视光电开发的Viztra-HE030图像处理板采用了工业级芯片RK3588,内部植入公司自主研发的智能图像算法,架构更先进,核心数8核(4大4小),算力6.0TOPS,支持丰富的输出接口,同时支持H264、H265两类视频编码。可实时对目标进行识别或者人为的的锁定,同时可以根据输出目标的靶量信息,对目标进行实时跟踪。这是达成目的的硬件条件。在算法领域,则需要一些特殊的算法。无人机执行任务时飞在高空,地面的物体就会显得较小,小目标通常指图像中像素面积小于32*32的物体,一般的AI算法难以实现精细锁定跟踪。SpeedDP将是图像算法工程师的得力助手。成都智慧工地AI智能

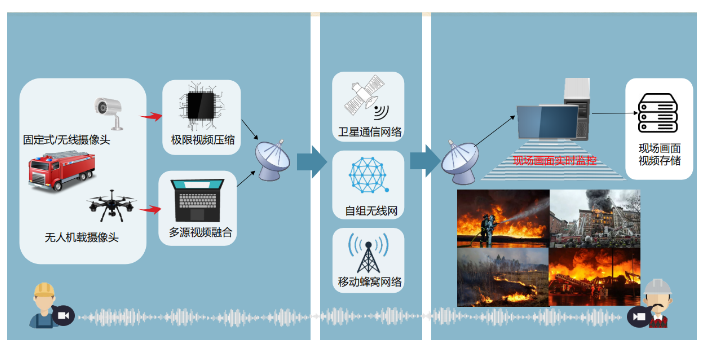
桥梁助航标志的正常显示有助于引导船舶正常航行,防止出现撞上大桥等事故的发生。因此需要定期定时对水上标志进行检查,尤其是夜间。由于传统的人工巡检模式存在局限性和检查盲区,巡查范围不够细致、作业效率低下、执法人员存在人身安全隐患等问题,逐渐被逐步淘汰,取而代之的是无人机搭载吊舱后实行远程定期巡检。无人机搭载慧视光电开发的慧视VIZ-YWT201微型双光吊舱集成了可见光摄像机、红外热像仪等传感器,能够实现昼夜成像,内置成都慧视自研全国产化RV1126图像跟踪板,搭载自研AI跟踪算法,重量280g,能够对桥梁上助航标志进行位置、颜色、结构的昼夜观察识别,辅助上报目标的图像及坐标信息。成都智慧交通AI智能算法分析软件模型部署,就是将机器学习模型集成到现有的生产环境中,在这个环境中,模型可以接受输入并返回输出。

YOLO系列算法是目标识别领域很重要的技术之一,因为性能强大、消耗算力较少,一直以来都是实时目标检测领域的主要范式。该框架被***用于各种实际应用,包括自动驾驶、监控和物流等行业的目标识别。自今年2月YOLOv9发布以后,近期,清华又推出了YOLOv10,作为计算机视觉领域的突破性框架,具备实时的端到端目标检测能力,通过提供结合效率和准确性的强大解决方案,延续了YOLO系列的传统。据悉,YOLOv10在各种模型规模上都实现了SOTA性能和效率。例如,YOLOv10-S在COCO上的类似AP下比RT-DETR-R18快1.8倍,同时参数数量和FLOP大幅减少。与YOLOv9-C相比,在性能相同的情况下,YOLOv10-B的延迟减少了46%,参数减少了25%。
一些化工园区、石油炼厂等需要在极其安全的环境中作业,因此对于园区的巡检工作十分关键。在长时间的工作中,园区的生产设备会出现被腐蚀、老化、磨损,给生产带来了风险,一旦检查疏忽,后果不堪设想。无人机搭载红外光电吊舱能够远距离检查设备,避免直接接触,实现对关键点的变倍放大观察,发现已存在或者潜在的泄漏、损坏,有效减少安全事故。另外无人机体积小巧、重量轻盈,能够在复杂环境中灵活穿梭。通过远程操控,无人机可以避免人工巡检过程中可能遇到的风险,确保人员安全。成都慧视开发的VIZ-100T三轴三光微型吊舱,具备10倍变焦能力的可见光相机,在白天进行巡检时,能够远距离对设备进行观察分析,同时集成了640*512的高分辨率红外相机,能够实现清晰的红外成像,在夜间进行安全巡检,搭载于小型无人机上,能够对出现问题的目标点位进行定位,实时视频数据回传,为园区巡检提供安全保障。深度学习是神经网络和机器学习的进化,是人工智能社区的创意。

无人机被广泛应用于目标跟踪,其机动灵活的特点对地面的被跟踪对象而言简直就是降维打击。搭载摄像头以及传感器等设备后,无人机可以实现自主飞行,然后通过植入高精度的AI目标跟踪算法,就能够分析摄像头范围内的物体,通过AI对特征的进一步提取分析,就能够单独识别出目标物体形状,并锁定其位置。这种技术可以用于各种领域的信息侦查、监视、打击等任务,比传统的人工模式更安全更高效。要想实现这样的技术,可以通过在无人机中安装光电吊舱,然后在吊舱中植入高性能的AI图像处理板,通过算法的赋能就能够实现。人工智能和机器学习,可用于分析建筑工地传感器和摄像头的实时数据。成都AI智能视觉识别
SpeedDP支持YOLOv8分割算法标注。成都智慧工地AI智能
在这些小型飞行器自主避障飞行中,算法的性能很关键,他能帮助规划路线,识别障碍物。为了满足这样小型化飞行器的需求,成都慧视开发了同样是小型化体积的AI图像处理板Viztra-LE026,这块板卡采用了瑞芯微高性能芯片RV1126,体积小、功耗低,用在小型无人机上不会过多增加其负担。而4和处理器,支持INT8和INT16,能够输出比较大2.0TOPS的算力,足以满足在复杂环境中快速进行识别检测。
此外,成都慧视推出的深度学习算法开发平台还能够针对算法进行模型训练,通过大量的训练来提升算法性能。 成都智慧工地AI智能
文章来源地址: http://dzyqj.m.chanpin818.com/chuanganqisr/sjtxcgq/deta_24714294.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。